工业机器人的真实生存指南:选型、调试与那些没人说的秘密
上周又一台机器人撞了末端工具。3万块的焊枪直接报废。说实话——我当时真想砸了示教器。
这事儿在自动化圈子里太常见了。大家光顾着吹工业机器人多牛,精度0.02mm,节拍多快,但没人告诉你调试时能把人逼疯。今天不聊虚的,就聊点真实体验。
别信厂商的PPT:负载与节拍的谎言
你去看展会,每个展台都写着“重复定位精度±0.01mm”、“最大负载20kg”。但那是极限条件下的数据啊。实际一跑,加速度一上去,惯量超出,电机直接过载报警。尤其搞六轴机器人搬运大工件时,末端工具重个一两公斤,曲线立马不对。厂商说“我们这款减速器刚性好”,可刚度再好也架不住你末端执行器没设计好吧!
我犯过最蠢的错:用一台标注负载10kg的SCARA去抓一个8kg的铸件,想着还有余量。结果节拍根本达不到,伺服电机温度飙到80度。后来查了手册,才发现人家那10kg是重心在法兰面,力矩不超过允许惯性矩的前提。😤
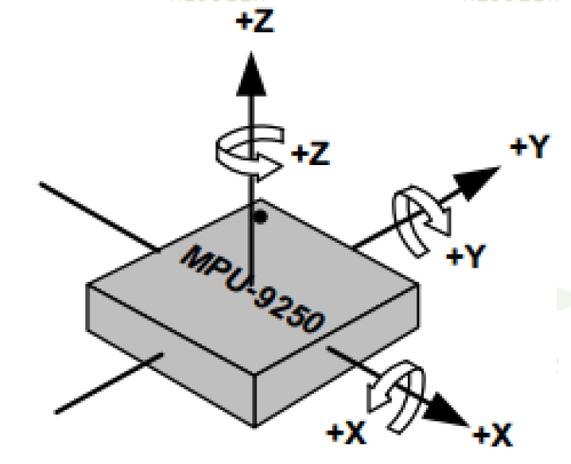 工业机器人负载能力测试惯性矩示意图
工业机器人负载能力测试惯性矩示意图
问:“那到底怎么选负载?”
答:宁大勿小,而且必须算力矩。把末端工具、工件重心都投影到法兰中心,算转动惯量,再对照机器人允许的惯性矩。有些厂商提供选型软件,但别全信——自己拿笔算一遍,再放大30%余量。这是血的教训。
视觉系统:美好设想 vs 现实骨感
现在不提视觉引导都不好意思说自己是做自动化的。随机抓取?无序分拣?听着牛。实际呢?
去年一个项目,我们用某品牌3D视觉+工业机器人做拆垛。算法跑得挺好,点云匹配99%,结果一到现场——灯光影响!纸箱颜色稍有变化就丢识。相机安装位稍微震动,标定参数全废。视觉和机器人手眼标定,哪里是矩阵求个逆那么简单。我调到凌晨三点,最后发现是背景里一扇窗户反光。你说气不气。
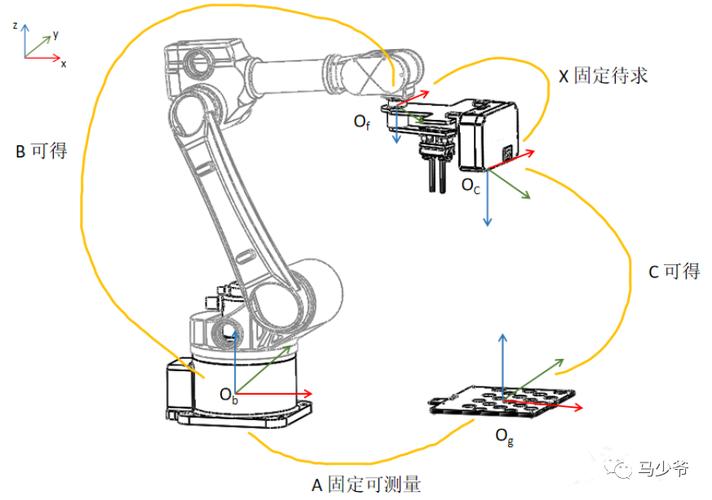 工业机器人与3D视觉手眼标定现场
工业机器人与3D视觉手眼标定现场
💡 我的建议:能加遮光罩就加,环境光要可控。另外,别追求无标记定位,在工装上贴个二维码辅助定位,鲁棒性提升不止一点。你非要玩深度学习抓一堆乱七八糟的料,批量小的时候调试成本比人工还高。
问:“协作机器人加视觉是不是更容易落地?”
答:容易得多,但别被‘协作’俩字骗了。多数协作机器人负载小、速度慢,视觉处理周期一长,节拍就跟不上。只能用在非关键工位。你要是哪天看见谁家用协作机器人跑高速分拣,那肯定是demo,不是产线。
维护的学问:减速器油和电池暴脾气
工业机器人定期维护这事,很多老板不当回事。等到减速器异响了,漏油了,才想起来。我见过一台用了五年的机器人,J3轴谐波减速器磨出铁粉,修一下比当年整机还贵——因为停产了,配件找不到。
❗ 记住:每工作3000小时或一年,必须检查油脂状态。本体电缆也要查,尤其手腕部分长期弯折。电池更坑:编码器电池没电,零点丢失,你得重新示教。有些老PLC通讯模块一掉电,程序没了,欲哭无泪。所以,备件要囤,尤其停产机型的驱动器和电机。
再说一个细节:接地。很多故障是接地不良引起的。机器人报一些莫名其妙的编码器通信错误,查来查去是动力线屏蔽层没接好。电气柜里那个地排,别嫌麻烦,多打几个端子。我吃过亏。
问:“国产替代进口,现在靠谱吗?”
答:分场景。如果是上下料、码垛这类简单的,国产四大家族之外的一些品牌,比如埃斯顿、埃夫特,已经凑合能用了,价格便宜一半。但要是焊接、喷涂对轨迹精度要求高的,或者高速高精度的SCARA用于3C,我还是会选那几家日系、欧系。国产的抖动和过冲控制还有差距,尤其低速时的稳定性。不过进步确实快,再给两三年,追上中端没问题。
到底要不要上机器人?算笔账
很多工厂盲目上自动化,看补贴,看面子。我见过一个做锅具的,上了两台工业机器人磨抛,结果因为产品换型太频繁,每次换工装重新示教要两天,机器人成了摆设。老板后来骂街。其实算算,如果全年有效运行时间不到60%,还不如用专机或者人工。
投资回收期控制在2年内是比较健康的。你得把整套系统——机器人本体、末端执行器、视觉、安全围栏、集成调试费全算上,除以节省的人工年薪。别只盯着机器人单价,那都是套路。
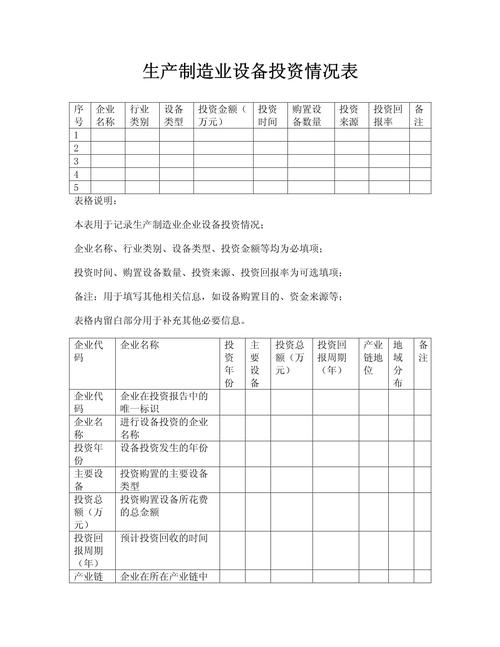 工业机器人自动化生产线投资回报计算表
工业机器人自动化生产线投资回报计算表
我现在的原则是:能用简单机构解决的,绝不用机器人;能用直角坐标的,不用关节式。不是瞧不起机器人,是维护成本和柔性之间你得自己权衡。有时候一个气缸解决的事,非要上六轴,除了显得高大上,没啥好处。
最后唠叨一句:这个行业变化快,保持学习吧。协作机器人、自主移动机器人、AI接入,这些概念沸腾,但落地的还是那些老老实实把基础做好的团队。别被PPT洗脑。