搞了二十年机器人集成,我为什么劝你别只看重复精度?
上周一个老客户打电话来,语气很冲。“你们的机器人不行啊,走出来的轨迹差了两毫米!”我当时心里一紧——二十年的经验告诉我,事情绝没那么简单。跑现场一看,工装基座松了。就这?就这。
我干机器人集成这行,从最早的点焊一直做到现在的无人工厂,说实话,见太多人掉进参数表的坑里。✅ 选机器人,盯着重复精度,简直就是最经典的门外汉行为。❗
重复定位精度?那玩意儿是最容易骗人的
所有厂商的样本册,都把“重复定位精度”印得老大。±0.02mm,±0.05mm……你看,多诱人。可实际呢?那个数据是空载、恒温、在特定速度下,用激光跟踪仪反复打点算出来的。你车间里温度波动8度,加了末端执行器,再跑个高速,绝对精度早就飘到不知哪里去了。
我见过最离谱的一次,一台标称±0.06mm的六轴,因为用户自己设计的焊枪支架长了50mm,加了负载后整条轨迹椭圆度差了0.5mm。老板当场飙脏话。不过话说回来,这能怪机器人吗?动力学的账,从来不是只看重复精度就能算清的。
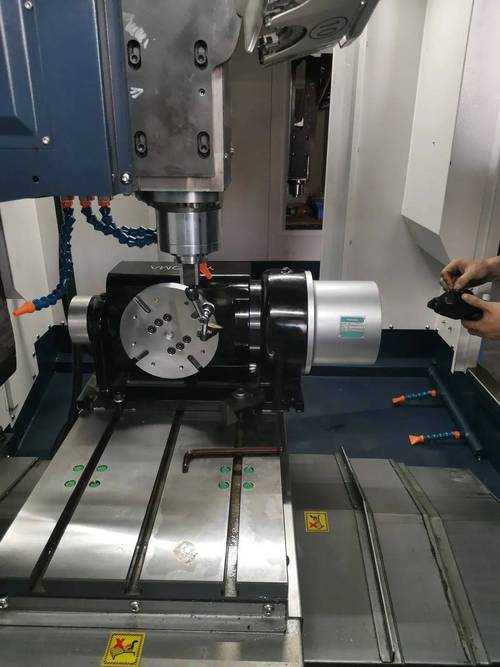
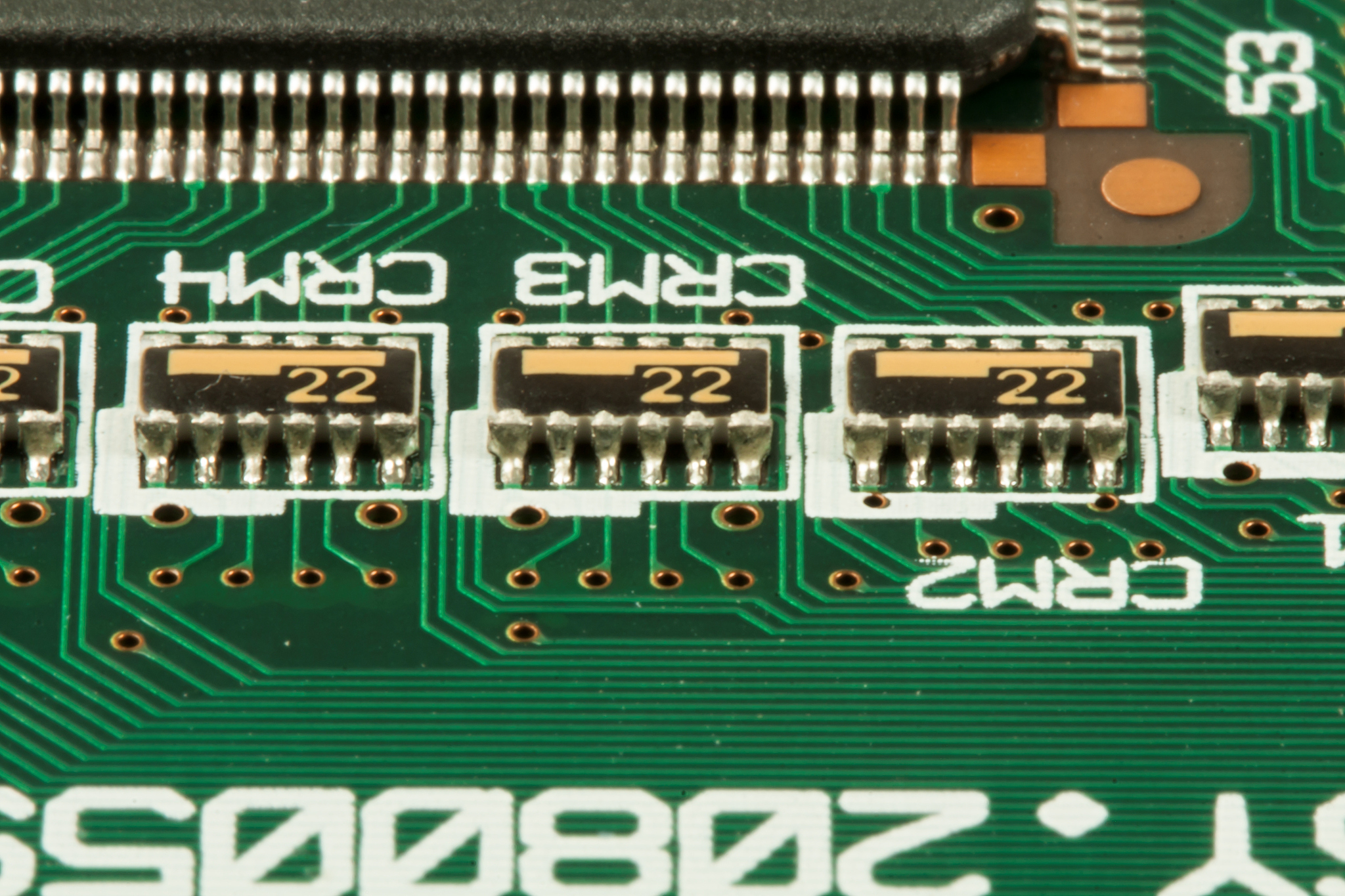
 工业机器人重复定位精度激光跟踪仪测试场景
工业机器人重复定位精度激光跟踪仪测试场景
负载不是越重越好,节拍才是要命的
另一个重灾区。很多人选机器人,只看负载能力——10kg,20kg,50kg。好像越大越占便宜。但很少人会细看负载曲线。💡 有些20kg的型号,在600mm臂展外最大负载只剩12kg,还要考虑手腕力矩。惯性参数不匹配,电机就会频繁过载报警,减速机寿命直接打对折。
还有节拍。我去年帮一家家电厂改造涂胶线,原来用210kg的大家伙,节拍72秒。换了台负载小一半但动态性能更好的,节拍压到48秒。一条线,一年多出一百万台产品。他们总经理后来吃饭时跟我说,早该听你的。感叹号我都懒得打。因为这种事,发生了太多太多。
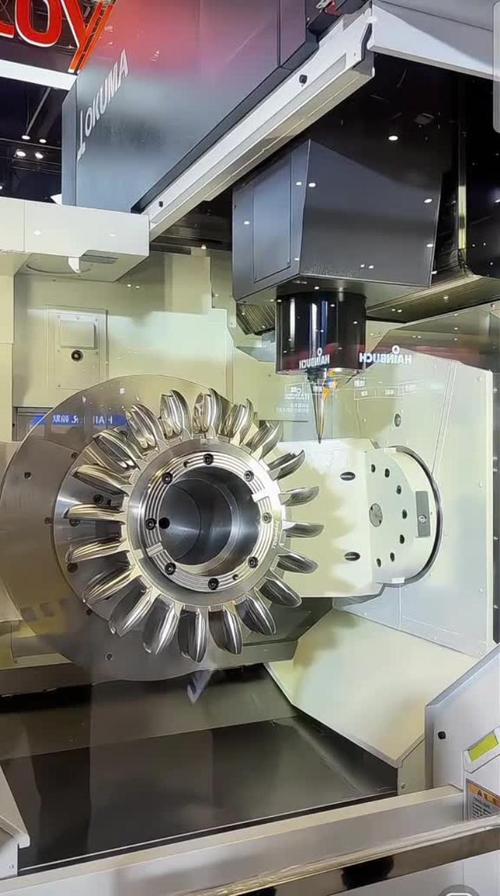
 汽车焊装线六轴机器人高速节拍现场
汽车焊装线六轴机器人高速节拍现场
协作机器人真的“协作”吗?——安全标准背后的真相
 协作机器人真的“协作”吗?——安全标准背后的真相
协作机器人真的“协作”吗?——安全标准背后的真相
这几年协作被炒得火。各行各业都在上。但我必须泼点冷水——有些应用,根本就是假协作。ISO/TS 15066里头把力限制和功率限制写得明明白白,可有些厂家为了凑“人机互碰不伤”这个卖点,碰撞检测的阈值设得奇高,真撞了,人该骨折还是骨折。
也有好的。我们做过一个装机项目,用功率限制模式,末端装上安全皮肤,工人可以在旁边手动引导。但前提是——完整的风险评估、边界限定、每半年重校传感器。那些以为买了协作就不用围栏的,醒醒吧。
问:协作机器人是不是完全不用围栏?
答:错。按国际标准,只有经过严格风险评估、满足力/功率限制、且末端工具无锐角、周边无挤压风险的情况下,才允许部分取消物理隔离。多数场景至少还需要光栅或压敏地垫。轻信厂家宣传直接裸奔,会被安监罚到哭。
问:怎么判断一个集成商是否靠谱?
答:很简单,看他问不问你真正的工艺需求。上来就推某型号、只报标准周期的,八成是草台班子。靠谱的集成商会先做动力学仿真,评估末端执行器惯量,甚至借台样机到你现场打点。还有,能坦诚告诉你“这活儿我不擅长”的,才算有底线。
写了这么多,其实就想说一句:机器人选型,参数表里的数字只是开场白。真正的考验,全在现场的那些意料之外里。别觉着±0.02就万事大吉了,哪天工装、环境、工艺一换,它可能连0.2都保不住。到最后,吃亏的还不是咱们搞制造的。