协作机器人的冷思考:从狂热到落地,我踩过的坑和真香现场
前几天去一个做精密电子生产的客户那边,他们产线主管指着角落里一台落灰的协作臂,叹口气说:“买来才发现,不是即插即用那么简单。”我愣了下——这玩意儿刚上市时,宣传不都说“开箱即用”、“零门槛”吗?说实话,那瞬间我特别有共鸣。这几年眼看着协作机器人从实验室概念变成工厂网红,但真正用好它的,又有多少呢?咱们今天不聊高大上的理论,就聊点车间里真实发生的事情。
先泼盆冷水:不是所有场景都适合上协作
我记得2019年去德国斯图加特看展会,某大厂展台上六轴机械臂像只温顺的大白兔,靠人力一推就能走轨迹示教,围观的人都啧啧称奇。那时我在笔记本上写了句:柔性制造的春天来了。可现在回头看,当初下判断太急了。协作机器人最适合的是多品种小批量、需要频繁切换任务的生产环境,比如实验室自动化、中小型CNC上下料、移动拧紧工站等等。真要让它去干重载搬运——动辄十几公斤,节拍还快——肯定是自讨苦吃。去年浙江某汽配厂买了两台负载5kg的协作臂想替代人工码垛,结果节拍跟不上,最后只能调去打螺丝。所以,选型前一句灵魂拷问:你的工况到底适不适合?
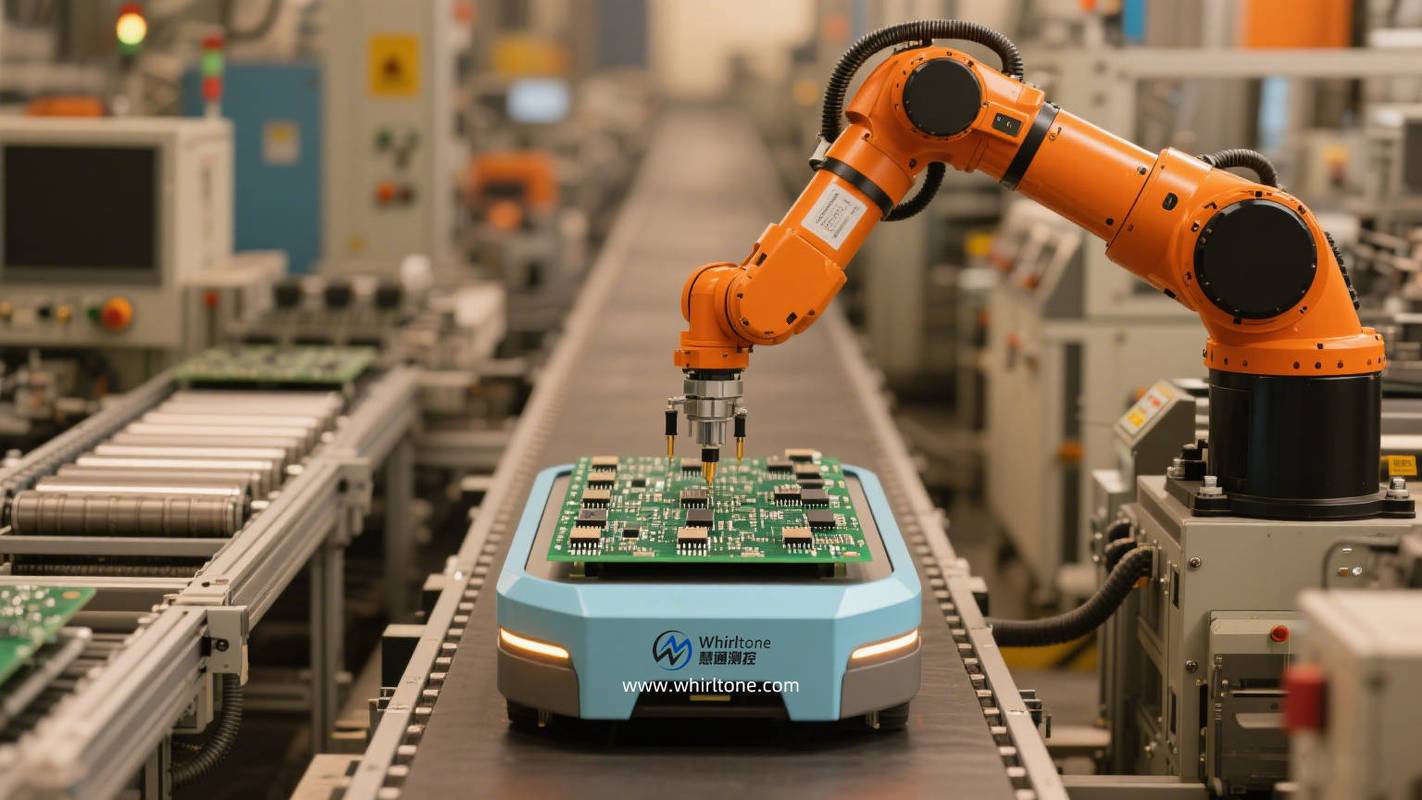 协作机器人小型电子装配线现场
协作机器人小型电子装配线现场
可别小看这个判断。我看到一组2024年的行业调查数据,大概有四成的企业初次引入协作机器人时,都高估了它对复杂流程的适应能力。比如说,很多人以为只要装上视觉,就能搞定无定位的抓取,但现实是:来料一致性、光照干扰、夹具气路没接好……随便一个小问题就能让项目卡壳。这不是机器人不行,是我们想得太简单。
选型时的纠结:负载、精度、品牌……哪个最坑?
有一回,一个做医疗器械的客户问我:“优傲的UR5e和节卡的Zu 5,到底谁更准?”我直接回他:“你的产品精度要求高到毫米级吗?如果没有,那关心这个就是掉坑。” 协作机器人重复定位精度现在普遍能做到±0.02mm—±0.03mm,比绝大多数人工操作要稳。真正影响精度的往往是安装平台的震动、末端工具的刚性、以及运动速度曲线。所以与其纠结参数表上那零点零几的差距,不如先把底座固定牢、结构共振避开。
负载也是重灾区。简单规则:实际抓取重量不要超过标称负载的80%。因为还有夹爪、线缆、加速度带来的额外力矩。而且不同品牌的标称负载定义不同——有些在腕部最大距离处都到不了额定值。看样册一定要翻到最后一页的负载曲线图,不然等着骂娘。
问:协作机器人一定要买大品牌吗?国产的靠不靠谱?
答:得看你的应用场景和后期支持。大品牌如发那科、库卡、安川,产品成熟、认证齐全,但交期长、价格咬手;国产的珞石、遨博、艾利特这些年进步真的很大,搞一般搬运、装配完全够用,而且技术支持和售后响应快。但千万记得考察你当地的服务网点,有些国产品牌渠道还没铺开,万一出故障,工程师飞过来都得好几天,那生产损失就大了。另外,如果你的设备要出口到欧美,CE和NRTL认证是绕不过去的坎,大品牌在这方面省心些。
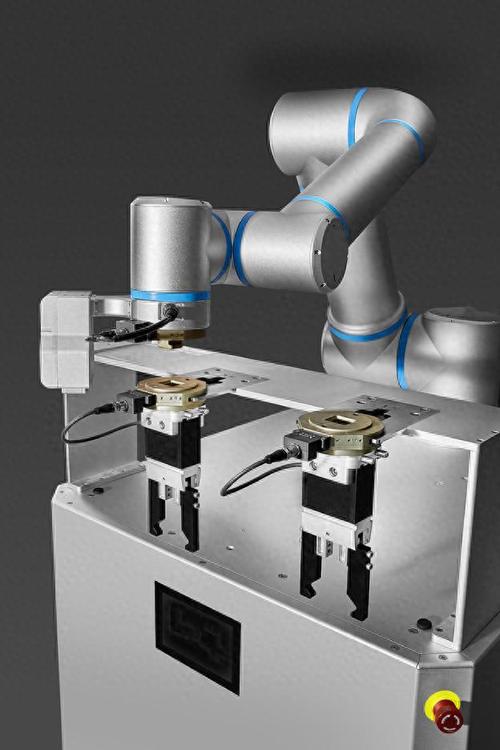 协作机器人末端工具快换装置
协作机器人末端工具快换装置
问:都说协作机器人安全“不用围栏”,真能像秀场那样人机混线吗?
答:❗这个问题必须认真说:别被营销视频忽悠了。协作机器人的本质是内置了碰撞检测和力限制,但不是所有工况都能裸奔。如果你的末端带了锐利的刀具、高温注塑头,或者高速抛洒物料,哪怕机器人本身很温顺,末端危险依然存在。按照ISO 10218和ISO/TS 15066标准,必须做整体风险评估。多数情况,至少需要光栅或激光扫描仪划定一个安全区域;完全无围栏的全人机协作,只适用于低风险操作。我见过一个真实case:某食品厂工人被花瓣形夹具刮到手臂缝了六针,因为碰撞检测没调好,停机扭矩设置得太高。安全这事,再啰嗦都不为过。
落地最大的坎:集成和编程其实不简单
 落地最大的坎:集成和编程其实不简单
落地最大的坎:集成和编程其实不简单
现在行业里喊得最响的“易编程”,一般都是指拖动示教或者简单图形界面。真相是:搞定一个完整的工站,你还得配视觉、力控、PLC通信、末端工具设计……这些活儿,依然需要系统集成商或者有经验的自动化工程师。我见过太多中小企业被“零编程”吸引,最后发现要么花更多钱请集成商,要么自己培养团队磕两个月。有一个小老板跟我吐槽:“他们手册上写五分钟速成,我信了。结果为了一个螺丝机拧紧扭矩闭环,折腾了整整三周。”
不过话说回来,这两年确实有进步。像基于Python或脚本语言的开源生态让很多有软件背景的人能快速上手。另外,AI视觉零样本抓取也慢慢落地了,看着传送带上乱七八糟的物品直接一把抓起,确实有点意思。但记住,落地的最后一公里永远是最脏最累的。
2024-2025值得关注的几个趋势
- 复合机器人爆发: 协作臂+AGV底盘,在半导体晶圆搬运、巡检、消毒领域开始大量出货。最大的挑战不是技术,而是现场环境变化太大,磁条和二维码定位受限,现在多用激光SLAM,对反光地面和动态人流还得优化。
- 大模型带来的自然语言编程: 你可以直接说“把桌子上的红色糖包放到蓝色盒子”,机器人通过多模态模型理解并生成运动序列。虽然现在准确率还不够高,但像谷歌RT-2和国内一些团队的工作让我看到了质变的可能。
- 力控与触觉传感器落地: 精密装配、打磨、抛光领域,协作机器人配上六维力传感器和浮动磨头,已经能把一致性做到比熟练工还高。特别在3C外壳打磨上,一条线省掉十几个打磨工,投资回收期不到18个月。
 协作机器人复合移动搬运场景
协作机器人复合移动搬运场景
最后再泼盆温水吧。去年有个调研说,超过六成的协作机器人项目没有达到预期ROI,主因就是配套跟不上、应用太单一。我反而觉得这才是好事——市场在冷静,炒作散去,静心搞应用落地的人才能留下来。哪天你看到一个工位,人和机器人没隔栏,有一搭没一搭地协作,旁边没有工程师拿示教器戳来戳去,那才是协作该有的样子。那一天,我看到一点苗头了。不过路还长。
💡 如果你正在考虑上协作机器人,建议先找一个不那么关键的工序做试点,别一上来就盯着核心产线。把工具端、工艺流程和人员培训跑顺了,再慢慢铺开。这样可以避免很多焦头烂额。