伺服系统选型与调试:那些年,我们一起追过的“高性能”陷阱
说实话,玩工业自动化的,谁没被伺服系统坑过几回?选型时参数吹得天花乱坠,实际一上电,震动、过冲、响应慢……各种幺蛾子。今天不扯虚的,聊聊血泪换来的经验。
记得五年前第一次负责一个高精定位项目,翻着选型手册,盯着功率和转速就定了型号。结果呢?电机烫得能煎鸡蛋,定位精度飘得像闹着玩。后来才明白——惯量比!这玩意儿不匹配,再牛的电机也白搭。
 伺服电机频繁烧毁线圈特写
伺服驱动器调试软件真实界面截图
去年调试一台三菱的伺服,自动调谐后定位时间要600ms,手动把速度前馈提到85%,时间压到200ms以内。但千万小心,前馈太高会过冲。有次我手贱调过头,机器直接撞了限位,旁边同事的脸都绿了。
振动抑制功能也别当摆设。很多驱动器内置陷波滤波器,需要扫频找出共振点。有一回我们测出共振频率在120Hz附近,设了两个陷波后——整个世界安静了。尤其搭配爱叫的直线电机,这招屡试不爽。
问:伺服电机啸叫,怎么消除?
答:啸叫多半是机械共振,或电流环噪声。先判断啸叫频率是否随转速变化:如果固定频率,多半是机械共振,尝试跳过该速度段或加陷波滤波器;若随转速变,可能是编码器反馈信号干扰,检查屏蔽层和接地,或者降低电流环增益。
工业伺服系统预测性维护看板界面
还有5G。去年在一个大型工厂打通了5G与伺服通讯,线缆省了90%,柔性生产切换快多了。但干扰问题也得重视,一次附近电焊作业,丢包率瞬间飙升,位置曲线像喝醉酒。后来加了冗余和本地缓存才好些。
行了,今天先聊这么多。伺服系统像头猛兽,驯服了能啃硬骨头,驯不好咬自己。下次分享几个奇葩故障,够你笑一阵。
伺服电机频繁烧毁线圈特写
伺服驱动器调试软件真实界面截图
去年调试一台三菱的伺服,自动调谐后定位时间要600ms,手动把速度前馈提到85%,时间压到200ms以内。但千万小心,前馈太高会过冲。有次我手贱调过头,机器直接撞了限位,旁边同事的脸都绿了。
振动抑制功能也别当摆设。很多驱动器内置陷波滤波器,需要扫频找出共振点。有一回我们测出共振频率在120Hz附近,设了两个陷波后——整个世界安静了。尤其搭配爱叫的直线电机,这招屡试不爽。
问:伺服电机啸叫,怎么消除?
答:啸叫多半是机械共振,或电流环噪声。先判断啸叫频率是否随转速变化:如果固定频率,多半是机械共振,尝试跳过该速度段或加陷波滤波器;若随转速变,可能是编码器反馈信号干扰,检查屏蔽层和接地,或者降低电流环增益。
工业伺服系统预测性维护看板界面
还有5G。去年在一个大型工厂打通了5G与伺服通讯,线缆省了90%,柔性生产切换快多了。但干扰问题也得重视,一次附近电焊作业,丢包率瞬间飙升,位置曲线像喝醉酒。后来加了冗余和本地缓存才好些。
行了,今天先聊这么多。伺服系统像头猛兽,驯服了能啃硬骨头,驯不好咬自己。下次分享几个奇葩故障,够你笑一阵。
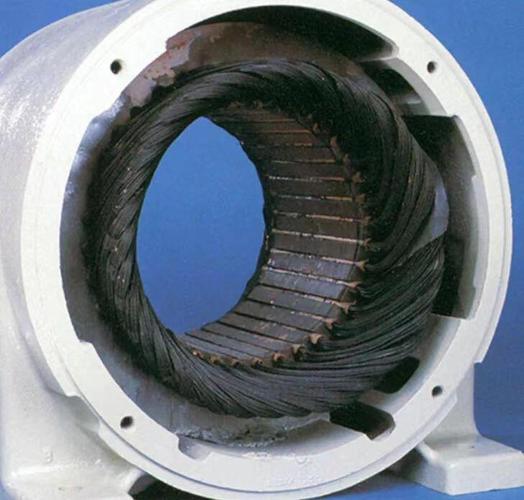 伺服电机频繁烧毁线圈特写
伺服电机频繁烧毁线圈特写
选型,别只看功率和转速
手册上那些标称值,都是实验室理想条件。你车间温度多少?粉尘大不大?震动环境如何?这些东西,教科书可不会仔细教。比如某品牌一款小惯量电机,纸面性能惊艳,装在有悬臂结构的设备上,直接震荡到怀疑人生……后来换个中惯量,立马消停。 总线协议更是个暗坑。EtherCAT还是Profinet?脉冲型还是总线型?别以为速度够快就行。去年一个改造项目,原用脉冲控制,客户非要上总线,结果因为老旧的控制器延迟,整个产线节拍反而慢了15%。血淋淋的教训。 问:伺服电机发热严重,正常吗? 答:先摸外壳,如果烫手到不能持续触摸(超过80°C),那肯定不正常。常见原因:一是过载,尤其低速大扭矩时;二是散热差,安装空间太憋屈;三是惯量比过大,电机长时间处于加减速过冲状态。先检查负载率和惯量匹配,再看散热风道有没有堵满棉絮——别笑,纺织厂经常这样。 问:多轴同步,位置偏差忽大忽小,怎么破? 答:这问题我碰过不下十次。首先,确认机械耦合有没有背隙,联轴器打滑;其次,检查各个轴的增益是否平衡,不要只调单轴,用示波器抓速度曲线,看跟随误差;最后,通讯同步周期没设置好的话,高速联动时偏差必大。现在不少驱动器有同步补偿算法,但前提是你得把机械参数输对。调试,那些参数不是摆设
大部分工程师习惯“自动调谐”,点一下,完事儿。结果呢?要么软绵绵,要么吱吱叫。伺服调试手册动辄几百页,真正要命的就那么几个参数:位置环增益、速度环积分时间常数、速度前馈。 伺服驱动器调试软件真实界面截图
去年调试一台三菱的伺服,自动调谐后定位时间要600ms,手动把速度前馈提到85%,时间压到200ms以内。但千万小心,前馈太高会过冲。有次我手贱调过头,机器直接撞了限位,旁边同事的脸都绿了。
振动抑制功能也别当摆设。很多驱动器内置陷波滤波器,需要扫频找出共振点。有一回我们测出共振频率在120Hz附近,设了两个陷波后——整个世界安静了。尤其搭配爱叫的直线电机,这招屡试不爽。
问:伺服电机啸叫,怎么消除?
答:啸叫多半是机械共振,或电流环噪声。先判断啸叫频率是否随转速变化:如果固定频率,多半是机械共振,尝试跳过该速度段或加陷波滤波器;若随转速变,可能是编码器反馈信号干扰,检查屏蔽层和接地,或者降低电流环增益。
伺服驱动器调试软件真实界面截图
去年调试一台三菱的伺服,自动调谐后定位时间要600ms,手动把速度前馈提到85%,时间压到200ms以内。但千万小心,前馈太高会过冲。有次我手贱调过头,机器直接撞了限位,旁边同事的脸都绿了。
振动抑制功能也别当摆设。很多驱动器内置陷波滤波器,需要扫频找出共振点。有一回我们测出共振频率在120Hz附近,设了两个陷波后——整个世界安静了。尤其搭配爱叫的直线电机,这招屡试不爽。
问:伺服电机啸叫,怎么消除?
答:啸叫多半是机械共振,或电流环噪声。先判断啸叫频率是否随转速变化:如果固定频率,多半是机械共振,尝试跳过该速度段或加陷波滤波器;若随转速变,可能是编码器反馈信号干扰,检查屏蔽层和接地,或者降低电流环增益。
维护与未来,从预防到预测
过去咱们搞维护,要么坏了修,要么定期换。现在条件好了,预测性维护不再是概念。振动传感器、温度传感器往电机上一贴,数据上云,AI算法盯趋势。上周看一家汽车零部件厂的案例,提前三天预警了轴承磨损,避免了一次意外停产——那损失,少说几十万。 数字孪生也开始落地。我们团队正在尝试把伺服驱动器的实时数据映射到虚拟模型,在电脑上模拟工艺调整,调好再下发真机。简直换了种工作方式。不过说实话,小厂上这套成本还是高,用不起全套,但局部搞一搞,比如关键工位数据采集,回报率很可观。 工业伺服系统预测性维护看板界面
还有5G。去年在一个大型工厂打通了5G与伺服通讯,线缆省了90%,柔性生产切换快多了。但干扰问题也得重视,一次附近电焊作业,丢包率瞬间飙升,位置曲线像喝醉酒。后来加了冗余和本地缓存才好些。
行了,今天先聊这么多。伺服系统像头猛兽,驯服了能啃硬骨头,驯不好咬自己。下次分享几个奇葩故障,够你笑一阵。
工业伺服系统预测性维护看板界面
还有5G。去年在一个大型工厂打通了5G与伺服通讯,线缆省了90%,柔性生产切换快多了。但干扰问题也得重视,一次附近电焊作业,丢包率瞬间飙升,位置曲线像喝醉酒。后来加了冗余和本地缓存才好些。
行了,今天先聊这么多。伺服系统像头猛兽,驯服了能啃硬骨头,驯不好咬自己。下次分享几个奇葩故障,够你笑一阵。