控制器在颤抖:从PID参数整定到边缘自治,一位老工程师的深夜笔记
上个月在潍坊出差,看到一套09年的PLC还在跑。有点恍惚。
那柜子里的灰尘厚得能种花,但梯形图逻辑纹丝不动。说实话,干我们这行久了,对“控制器”这三个字会有一种……复杂的感情。一方面觉得它太基础了,就像螺丝刀一样;另一方面,当产线半夜停摆、触摸屏上跳出个看不懂的故障码,你又恨不得把控制器拆开来拜一拜。
 工业PLC控制器控制柜接线实拍
现在的 可编程逻辑控制器,早就不是以前那个只会逻辑运算的傻瓜了。现在它要处理模拟量、运动控制,还要和机器人对话。不过话说回来,太复杂的东西也容易惹麻烦,对吧?功能块一嵌套,后来的维护人员看得直瞪眼——这谁写的?哦,是自己三年前写的。
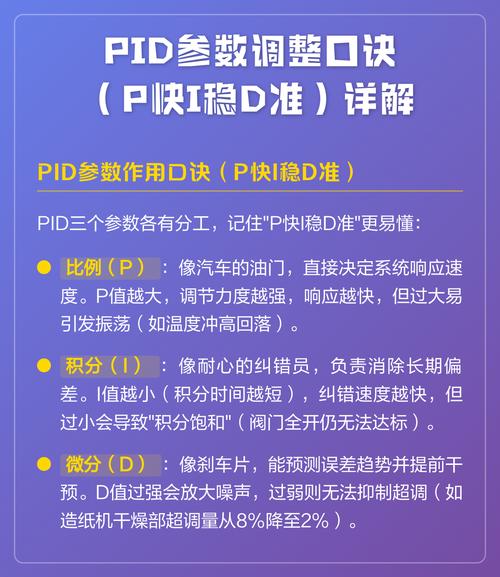
PID参数:调的不是增益,是人心
有一次,一个干燥线的温度波动得离谱。±5度的偏差,产品报废率蹭蹭涨。操作工老张把增益从1.2拧到3.0,过冲更大了。他一脸无辜。
我过去一看,PID控制器的积分时间设成了0秒,微分关掉了。这不就是纯比例控制嘛!能稳住才怪。先加上积分,把积分时间调到30秒;再慢慢加微分,D设到8秒左右。波形从锯齿变成一条直线——老张表情像见了鬼。
❗ 这种瞬间,会让你觉得自控原理没白学。但说实话,很多现场的 温度控制器 或者 过程控制器,自整定功能都挺鸡肋的。还是得靠人,靠那只手去感觉被控对象的惰性。
💡 小贴士:如果系统有机械间隙,微分环节别加太猛,否则执行器会来回抖,叫声刺耳。我见过一台阀门抖得连法兰螺丝都松了。
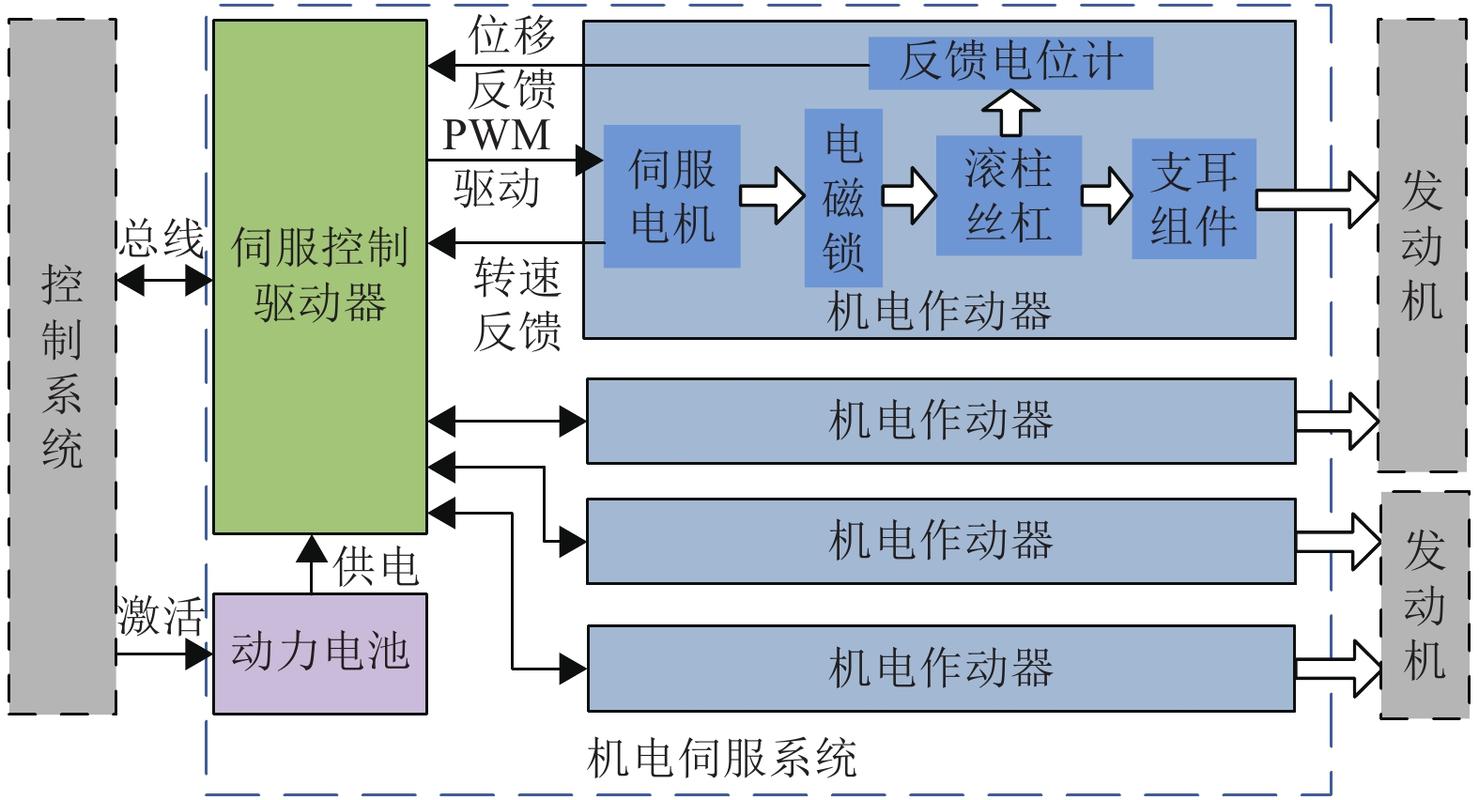
多轴运动控制器与伺服驱动接线示意图
不过现在也有融合的趋势。比如倍福的TwinCAT,在PC上软PLC+软运动控制,把Windows变成实时系统。第一次用的时候,我确实挺震撼——但后来发现,Windows更新重启这毛病能让人崩溃。工业现场,我还是倾向于硬件 控制器 加实时操作系统,简单粗暴。
问:现在很多设备都开始用嵌入式控制器+Python了,传统PLC还有必要吗?
工业PLC控制器控制柜接线实拍
现在的 可编程逻辑控制器,早就不是以前那个只会逻辑运算的傻瓜了。现在它要处理模拟量、运动控制,还要和机器人对话。不过话说回来,太复杂的东西也容易惹麻烦,对吧?功能块一嵌套,后来的维护人员看得直瞪眼——这谁写的?哦,是自己三年前写的。
PID参数:调的不是增益,是人心
有一次,一个干燥线的温度波动得离谱。±5度的偏差,产品报废率蹭蹭涨。操作工老张把增益从1.2拧到3.0,过冲更大了。他一脸无辜。
我过去一看,PID控制器的积分时间设成了0秒,微分关掉了。这不就是纯比例控制嘛!能稳住才怪。先加上积分,把积分时间调到30秒;再慢慢加微分,D设到8秒左右。波形从锯齿变成一条直线——老张表情像见了鬼。
❗ 这种瞬间,会让你觉得自控原理没白学。但说实话,很多现场的 温度控制器 或者 过程控制器,自整定功能都挺鸡肋的。还是得靠人,靠那只手去感觉被控对象的惰性。
💡 小贴士:如果系统有机械间隙,微分环节别加太猛,否则执行器会来回抖,叫声刺耳。我见过一台阀门抖得连法兰螺丝都松了。
多轴运动控制器与伺服驱动接线示意图
不过现在也有融合的趋势。比如倍福的TwinCAT,在PC上软PLC+软运动控制,把Windows变成实时系统。第一次用的时候,我确实挺震撼——但后来发现,Windows更新重启这毛病能让人崩溃。工业现场,我还是倾向于硬件 控制器 加实时操作系统,简单粗暴。
问:现在很多设备都开始用嵌入式控制器+Python了,传统PLC还有必要吗?
答:太有必要了。那些非标自动化公司,用STM32或者树莓派跑Python控制一些简单动作,成本低得吓人。我认识个小团队,用树莓派做了个贴标机控制器,卖得不错。但是!一旦到了几十个伺服轴、需要严格的安全逻辑、或是流程行业那种几百个I/O点的场合,你用嵌入式?找死。PLC的冗余、热插拔、模块化,这些工业特性是几十年血泪换来的。嵌入式控制器暂时只能在特定细分领域抢食,真要全面替代,还早着呢。而且,工厂电工能看得懂Python吗?能在线修改梯形图不停机吗?这便是生态壁垒。 问:选控制器的时候,最该注意什么?
答:别只看CPU速度和点数。第一看通讯协议——能不能轻松连上你现有的变频器、视觉系统?现在Profinet、EtherCAT、Ethernet/IP混战,选错了以后集成脱层皮。第二看编程环境——有的国产控制器仿三菱仿得挺好,但软件动不动崩溃,保存前不备份你就等着哭吧。第三,也是最关键的,看供货周期。去年缺芯,某大品牌的PLC交期52周!多少个项目因为它黄了。所以现在我都建议客户备选一两个国产 控制器 品牌,能救急。 深夜写这些,其实是想说,控制器这东西,就像人体的神经系统。平时感知不到,一出问题就瘫痪。它不是冷冰冰的模块,而是一个工业现场的决策者。从老式继电器柜,到现在的集成机器视觉和深度学习的 智能控制器,变得是载体,不变的是对可靠性的苛刻要求。 最后啰嗦一句:如果你下次去车间,听到电气柜有轻微的嗡嗡声,别烦。那是控制器活着的声音。它正拼命扫描着程序,让这个世界转得稍微有秩序一点点。
PLC没死,只是变野了
去年有个项目,客户非要上 边缘控制器。想法很前卫——数据就地清洗,直接扔给MES,省一台工控机。实施的时候我带着小李蹲了三天。结果呢?OPC UA配置卡了两天,最后发现是固件版本和那个德国品牌的IO模块有一腿,不兼容。 你猜怎么着?客户急了,骂骂咧咧让我们换回传统 PLC。换上西门子S7-1500,半天搞定所有逻辑——尽管那玩意儿的网络功能,真的,有时慢得像老牛拉车。但我得承认,它稳。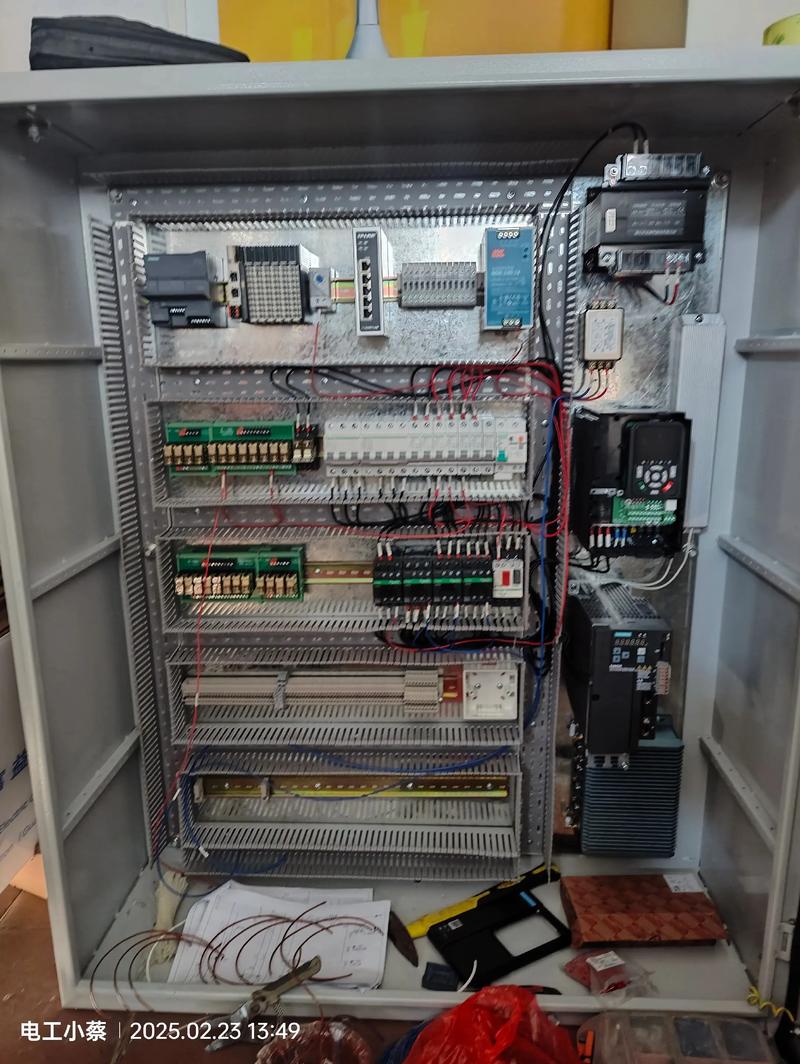 工业PLC控制器控制柜接线实拍
现在的 可编程逻辑控制器,早就不是以前那个只会逻辑运算的傻瓜了。现在它要处理模拟量、运动控制,还要和机器人对话。不过话说回来,太复杂的东西也容易惹麻烦,对吧?功能块一嵌套,后来的维护人员看得直瞪眼——这谁写的?哦,是自己三年前写的。
工业PLC控制器控制柜接线实拍
现在的 可编程逻辑控制器,早就不是以前那个只会逻辑运算的傻瓜了。现在它要处理模拟量、运动控制,还要和机器人对话。不过话说回来,太复杂的东西也容易惹麻烦,对吧?功能块一嵌套,后来的维护人员看得直瞪眼——这谁写的?哦,是自己三年前写的。
PID参数:调的不是增益,是人心
 PID参数:调的不是增益,是人心
有一次,一个干燥线的温度波动得离谱。±5度的偏差,产品报废率蹭蹭涨。操作工老张把增益从1.2拧到3.0,过冲更大了。他一脸无辜。
我过去一看,PID控制器的积分时间设成了0秒,微分关掉了。这不就是纯比例控制嘛!能稳住才怪。先加上积分,把积分时间调到30秒;再慢慢加微分,D设到8秒左右。波形从锯齿变成一条直线——老张表情像见了鬼。
❗ 这种瞬间,会让你觉得自控原理没白学。但说实话,很多现场的 温度控制器 或者 过程控制器,自整定功能都挺鸡肋的。还是得靠人,靠那只手去感觉被控对象的惰性。
💡 小贴士:如果系统有机械间隙,微分环节别加太猛,否则执行器会来回抖,叫声刺耳。我见过一台阀门抖得连法兰螺丝都松了。
PID参数:调的不是增益,是人心
有一次,一个干燥线的温度波动得离谱。±5度的偏差,产品报废率蹭蹭涨。操作工老张把增益从1.2拧到3.0,过冲更大了。他一脸无辜。
我过去一看,PID控制器的积分时间设成了0秒,微分关掉了。这不就是纯比例控制嘛!能稳住才怪。先加上积分,把积分时间调到30秒;再慢慢加微分,D设到8秒左右。波形从锯齿变成一条直线——老张表情像见了鬼。
❗ 这种瞬间,会让你觉得自控原理没白学。但说实话,很多现场的 温度控制器 或者 过程控制器,自整定功能都挺鸡肋的。还是得靠人,靠那只手去感觉被控对象的惰性。
💡 小贴士:如果系统有机械间隙,微分环节别加太猛,否则执行器会来回抖,叫声刺耳。我见过一台阀门抖得连法兰螺丝都松了。
运动控制器与CNC:两兄弟的暗自较劲
前几天被问到:“运动控制器不就是个高级PLC吗?” 我差点一口茶喷出来。不不不,完全不是一回事。 PLC侧重逻辑顺序,运动控制器侧重轨迹规划。你要做五轴联动曲面加工,靠PLC的梯形图写插补?能把你写哭。这时候得上专用的 运动控制卡 或者独立式运动控制器,像翠欧、ACS。它们内部有DSP,专门跑复杂的运动学算法,插补周期可以到125微秒。PLC能做到?除非带运动控制功能块,但那也是软硬结合,不是纯逻辑扫描了。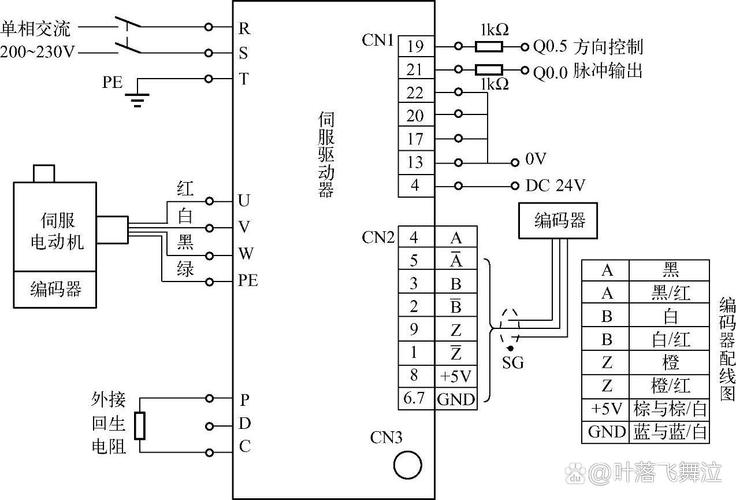 多轴运动控制器与伺服驱动接线示意图
不过现在也有融合的趋势。比如倍福的TwinCAT,在PC上软PLC+软运动控制,把Windows变成实时系统。第一次用的时候,我确实挺震撼——但后来发现,Windows更新重启这毛病能让人崩溃。工业现场,我还是倾向于硬件 控制器 加实时操作系统,简单粗暴。
问:现在很多设备都开始用嵌入式控制器+Python了,传统PLC还有必要吗?
多轴运动控制器与伺服驱动接线示意图
不过现在也有融合的趋势。比如倍福的TwinCAT,在PC上软PLC+软运动控制,把Windows变成实时系统。第一次用的时候,我确实挺震撼——但后来发现,Windows更新重启这毛病能让人崩溃。工业现场,我还是倾向于硬件 控制器 加实时操作系统,简单粗暴。
问:现在很多设备都开始用嵌入式控制器+Python了,传统PLC还有必要吗?
答:太有必要了。那些非标自动化公司,用STM32或者树莓派跑Python控制一些简单动作,成本低得吓人。我认识个小团队,用树莓派做了个贴标机控制器,卖得不错。但是!一旦到了几十个伺服轴、需要严格的安全逻辑、或是流程行业那种几百个I/O点的场合,你用嵌入式?找死。PLC的冗余、热插拔、模块化,这些工业特性是几十年血泪换来的。嵌入式控制器暂时只能在特定细分领域抢食,真要全面替代,还早着呢。而且,工厂电工能看得懂Python吗?能在线修改梯形图不停机吗?这便是生态壁垒。 问:选控制器的时候,最该注意什么?
答:别只看CPU速度和点数。第一看通讯协议——能不能轻松连上你现有的变频器、视觉系统?现在Profinet、EtherCAT、Ethernet/IP混战,选错了以后集成脱层皮。第二看编程环境——有的国产控制器仿三菱仿得挺好,但软件动不动崩溃,保存前不备份你就等着哭吧。第三,也是最关键的,看供货周期。去年缺芯,某大品牌的PLC交期52周!多少个项目因为它黄了。所以现在我都建议客户备选一两个国产 控制器 品牌,能救急。 深夜写这些,其实是想说,控制器这东西,就像人体的神经系统。平时感知不到,一出问题就瘫痪。它不是冷冰冰的模块,而是一个工业现场的决策者。从老式继电器柜,到现在的集成机器视觉和深度学习的 智能控制器,变得是载体,不变的是对可靠性的苛刻要求。 最后啰嗦一句:如果你下次去车间,听到电气柜有轻微的嗡嗡声,别烦。那是控制器活着的声音。它正拼命扫描着程序,让这个世界转得稍微有秩序一点点。