矿区无人驾驶的真实账本:三年回本?还是技术骗局?
没人喜欢下矿井。 更没人喜欢在矿区开卡车——颠簸、粉尘、二十四小时连轴转。 把命拴在轮胎上,一个月挣一万出头? 年轻人早不干了。 所以矿老板们盯上了无人驾驶,你说这是技术驱动? 哈,分明是人力危机逼的。
可是,无人矿卡跑了一年半,账能不能算平? 我蹲了几个项目现场,发现这事儿远不是PPT里那么光鲜。 有时候,一辆车趴窝,整条产线都得停——修的还不是机械臂,是代码里的一个死锁。 说实话,工业场景的容错率……低得可怕。
矿区:无人驾驶的“应许之地”吗?
圈里人总说,矿区是自动驾驶的最佳落地场景——封闭园区、低速、固定路线。 对。 但只对了一半。 矿区其实极度碎片化。 煤矿的巷道路窄,铁矿的装载点三天一换,水泥矿的粉尘能把激光雷达糊成瞎子。 没有两座矿是完全一样的,这意味着每个项目都得做大量定制。 标准化? 远着呢。
今年年初,内蒙某露天矿的无人运输车队出了事故:一辆满载的矿卡在排土场边缘突然刹车,后面的车直接追尾。 查了半天,不是传感器故障,是融合算法把一堆土丘误识别成了障碍物——虚警。 虚警比漏报更烦人你知道吧? 一急停,效率直接掉20%。 矿长那脸黑的,比煤还难看。
 露天矿区无人驾驶卡车车队装卸作业
露天矿区无人驾驶卡车车队装卸作业
不过话说回来,有些场景确实跑通了。 像鄂尔多斯的几个大型煤矿, 无人矿卡已经实现了常态化的7x24小时编组运行, 每台车配一个远程安全员,一个人盯四辆车。 效率? 持平有人驾驶,但轮胎磨损和油耗居然降了—— 因为机器不会猛踩油门、不会急打方向盘。 这点让我挺意外。 所以不是技术不行,是得找对工况匹配度。
传感器堆满,还是纯视觉? 路线之争在矿区重演
乘用车那一套争论,全搬到矿卡上了。 一派主张多传感器融合:激光雷达、毫米波雷达、红外热成像、4D成像雷达……甭管用不用得上,先装八个。 另一派觉得纯视觉就够了,摄像头便宜啊,矿区速度不到40km/h,算力要求也低。
我站…… 融合派。 原因很简单:矿区的灰尘和雨雪是视觉的天敌。 去年冬天在新疆的试验场,-30℃ ,摄像头镜面冻了层冰壳,纯视觉方案直接宕机。 毫米波雷达倒是能穿透扬尘,可它分不清土堆和岩石。 最终还得靠激光雷达的点云做三维建模。 不过,64线激光雷达的价格…… 唉,矿老板一听到单价就骂娘。 现在行业在赌固态激光雷达的降本速度,但起码还要两年。
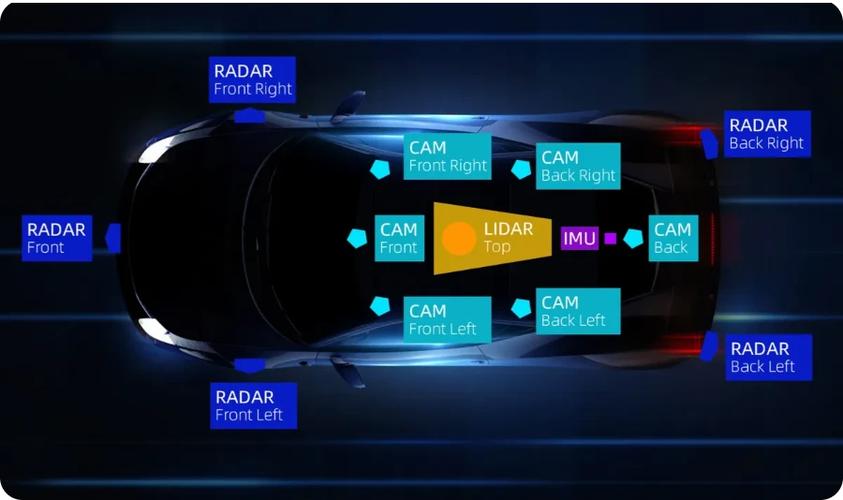 自动驾驶传感器融合点云数据处理示意图
自动驾驶传感器融合点云数据处理示意图
还有个有趣的现象:有些团队开始试用4D毫米波雷达,声称分辨率接近低线束激光雷达,价格只要十分之一。 我在包头见过一次demo,点云确实密集了不少,但高度信息的稳定性还不行,过坑洼路面时颠簸会导致目标丢失。 工程师说——“再给俩月。” 这话听无数次了。
成本幻觉:省了司机,但养了更大一支队伍
 成本幻觉:省了司机,但养了更大一支队伍
成本幻觉:省了司机,但养了更大一支队伍
咱们算笔狠账。 一座年产千万吨的露天矿,至少需要50台宽体车,司机150人(三班倒)。 人均年薪按12万算,一年人力成本1800万。 换成无人驾驶系统,单车改造费大约80万,50台就是4000万。 软硬件平台、通信基站、高精地图采集,再砸进去1000万。 一次性投入5000万。 然后还得养维护团队:现场运维工程师、软件算法支持、远程监控员。 人数虽然少,但贵得要死—— 好的V-SLAM工程师年薪60万起步。 综合算下来,三年能回本? 悬。 除非矿区规模再大一圈,或者政府给补贴。
问:无人矿卡到底能省多少司机? 不是号称“零人工”吗?
答:零人工是扯淡。 现阶段的法律法规要求每辆车必须配备远程安全员,或者有人跟车。 虽说一个人可以监控4-6辆车,但碰到复杂路况(比如挖掘机突然更换工作面),安全员得立刻接管,精神高度紧张。 所以实际省掉的是[驾驶]这个动作,但没省掉[监控]这个岗位。 真正的“去人化”只在极少数示范区实现,还得等法规松绑。
问:万一出事怎么办? 责任算谁的? 矿上敢用吗?
答:尖锐。 现行法律下,自动驾驶系统不是法律主体,出了事故还是车主的责任。 所以矿方通常会跟技术供应商签复杂的免责协议,基本把风险转嫁过去。 供应商呢,拼命买保险,同时拼命堆安全冗余:双冗余制动、双电源、双通信链路。 但真撞了人,社会舆情能压死人。 所以现在矿区无人驾驶都在追求一个指标:百万公里无事故。 没达到这个数之前,很多矿主会悄悄安排有人车跟在无人车后面…… 你说这叫什么无人驾驶。
还有笔隐性成本容易被忽略:路权争夺。 无人车和有人车混行的时候,由于无人车为了安全会保留很大的安全冗余,导致效率极低。 必须有严格的隔离措施,这又增加了管理成本。 有些矿干脆把无人车作业区用栅栏围起来,专路专用,才把效率提上去。
2024年,一些正在发生的改变
尽管一地鸡毛,行业还是在往前拱。 今年有几件事值得关注:一是5G专网+边缘计算开始在矿区普及。 数据不再全传到云端,而是在本地MEC处理,延迟降到10毫秒以内,远程控车终于不卡了。 二是出现了无轨导航的尝试,不再依赖地面磁钉或路标,直接用SLAM做实时定位,柔性更高,省了基建费。 三是有人搞了装载协同:挖掘机和矿卡之间通过V2X自动匹配,不用人工调车。 我去塔山矿看了,那个自动装载的误差能控制在10厘米以内,帅是真帅——但一次标定花了三天。
说实话,矿区无人驾驶现在处于从[能跑]到[好用]的跨越阶段。 技术原理早就验证了,剩下的全是工程问题:防水、防尘、抗震、电磁兼容…… 这些才真正决定产品寿命。 有个厂家给我吹牛说他们的域控制器IP69K防护,结果洗了三次车,接口氧化了。 真用着环境不比实验室。
💡 如果你想评估自己的矿区适不适合上无人驾驶,我总结三条:第一,看生产节奏是否允许效率波动;第二,看装载和运输流程能否标准化;第三,看有没有愿意长期驻扎现场的算法团队。 缺任何一条,建议先观望。 不然后期扯皮扯到你崩溃。
矿车无人化不是换辆车那么简单,它是采矿工艺的重塑。 毕竟机器不知道什么叫累,但代码知道什么叫疼——崩一次,全盘停。 敬畏现场,别总想着颠覆。