
在物理学和工程学中,倒立摆是一个经典而有趣的话题。它以其简单却难以捉摸的特性吸引了众多学者和工程师的关注。
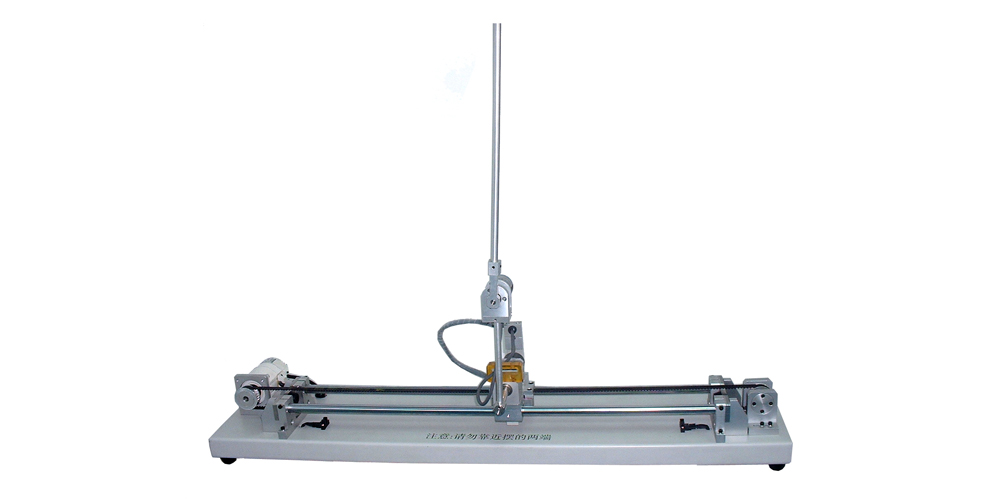
倒立摆,顾名思义,是一个能够保持倒立状态的摆。它由一个轻杆和固定在杆端的重物组成,整个系统通过支点与地面相连。在没有任何外部作用力的情况下,倒立摆会由于重力的作用而倒下。但是,如果我们在摆动的过程中给予适当的控制力,就可以使其保持倒立状态,进行稳定的摆动。
倒立摆的稳定性取决于两个关键因素:重物的质量和摆杆的长度。重物的质量越大,摆杆的长度越短,倒立摆的稳定性就越好。这是因为重物的质量越大,重力矩就越大,摆杆抵抗外界干扰的能力就越强。而摆杆的长度越短,摆动周期就越短,控制系统的反应时间就相对更充足,有利于保持倒立摆的稳定。
倒立摆的控制技术
要实现倒立摆的稳定摆动,关键在于对其进行精确的控制。常用的控制方法有PID控制、模糊控制、神经网络控制等。其中,PID控制以其简单实用而广泛应用于倒立摆的控制中。PID控制器通过对倒立摆的位移、速度和加速度进行实时检测,计算出控制量,从而调整施加在摆杆上的力,使倒立摆保持稳定。
模糊控制则是一种基于模糊数学和模糊逻辑的控制方法。它通过对倒立摆的状态进行模糊化处理,根据模糊规则库进行推理,得出控制量。模糊控制对于处理倒立摆这种非线性、不确定性的系统具有较好的效果。
倒立摆的应用实例
倒立摆作为一种典型的非线性控制系统,在实际应用中具有广泛的用途。例如,在航空航天领域,倒立摆可以作为模拟飞行器姿态控制的实验平台,帮助研究人员分析和评估各种控制算法的有效性。在机器人技术中,倒立摆作为一种动态平衡测试工具,可用于评估机器人的动态稳定性和运动性能。
此外,倒立摆还在教学领域发挥着重要作用。许多高校将其作为自动化、控制科学与工程等专业的实验课程,旨在帮助学生深入理解非线性控制系统的原理和控制方法。
随着科技的进步和研究的深入,倒立摆在未来有望取得更多的突破和应用。一方面,随着新型材料和制造工艺的发展,倒立摆的硬件性能将得到进一步提升,为实现更高速、更稳定的摆动打下基础。
另一方面,随着人工智能、深度学习等技术的发展,倒立摆的控制方法将更加智能化和自适应。未来,我们有望看到基于深度学习的倒立摆控制算法,能够自适应地调整控制策略,以应对各种复杂环境和任务需求。
倒立摆作为一种典型的非线性控制系统,不仅具有深厚的理论价值,还在实际应用中展现出广泛的用途和潜力。随着科技的不断进步和研究的深入,我们有理由相信倒立摆将在未来发挥更加重要的作用。
免责声明:文章内容来自互联网,本站仅提供信息存储空间服务,真实性请自行鉴别,本站不承担任何责任,如有侵权等情况,请与本站联系删除。

